
こんばんは、所長です。
今回は「スイカもカボチャもOKの観察者式自動収穫装置」!
スイカとカボチャは同じように栽培できるもんで、どっちを植えても動作する装置となります。
コンポスターで骨粉を生成するならスイカのほうが効率が良いのでスイカを植えましょう。
完成図
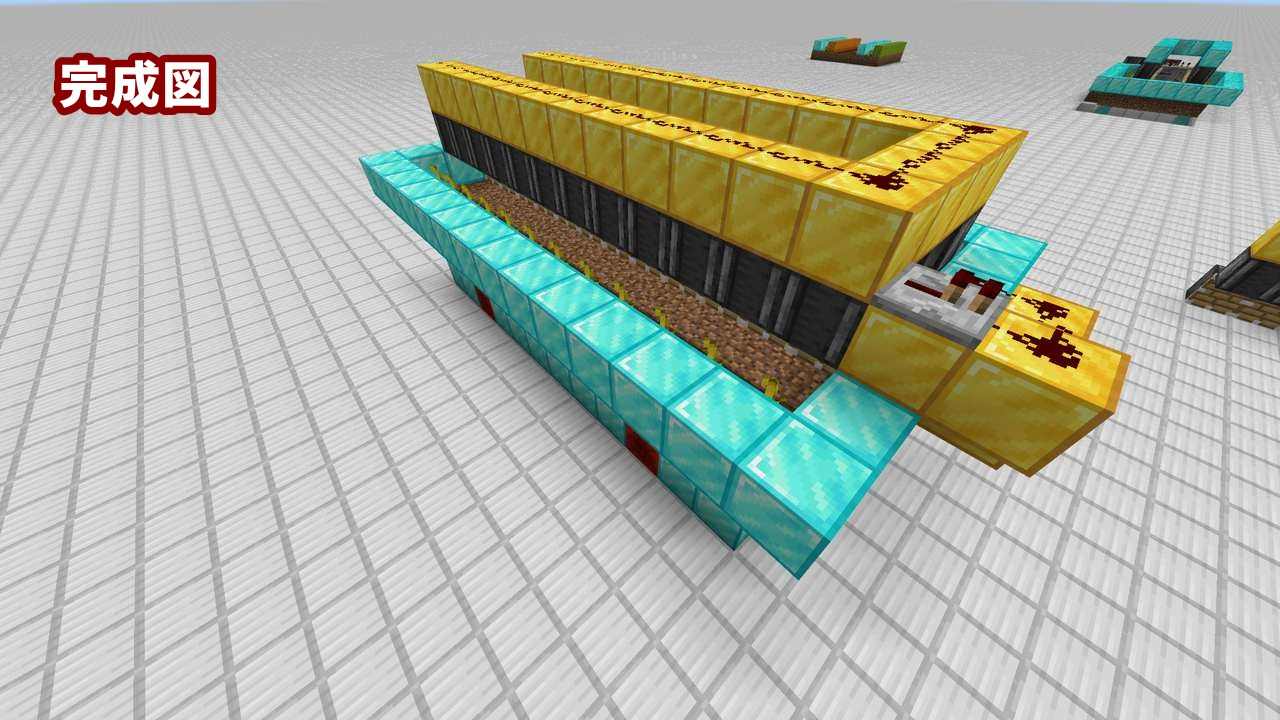
完成図。
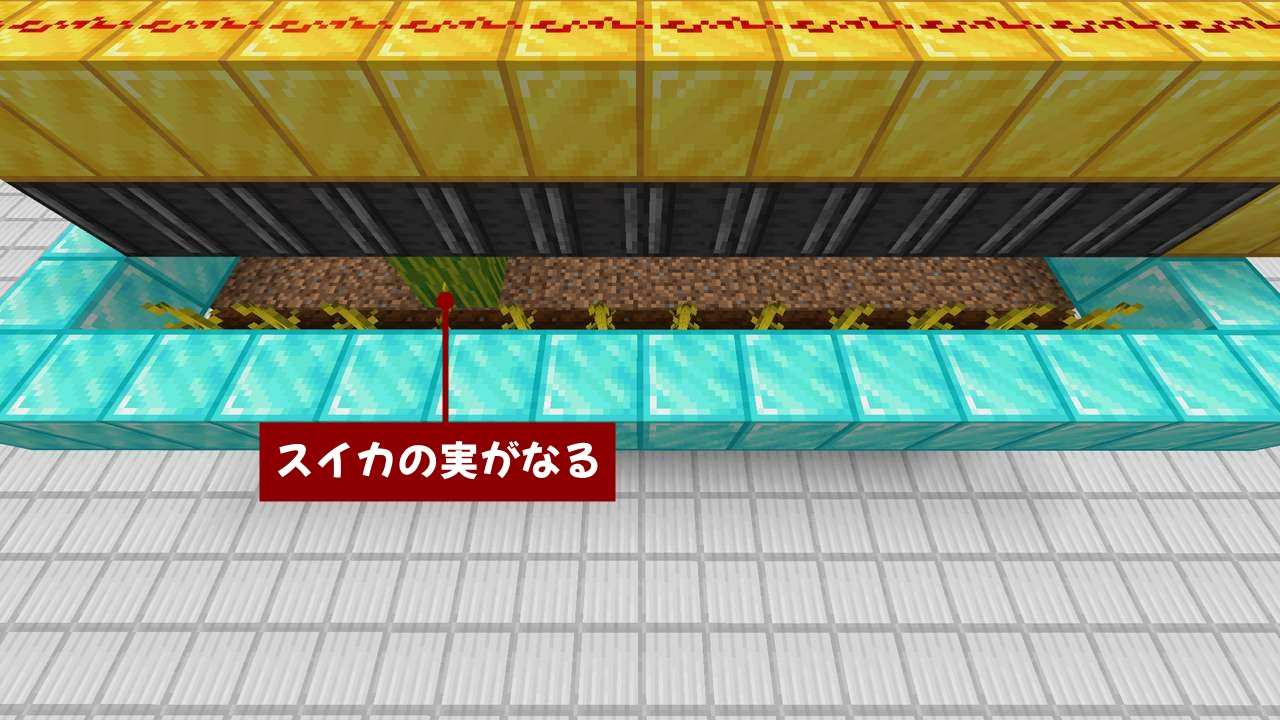
スイカやカボチャの実がなると、
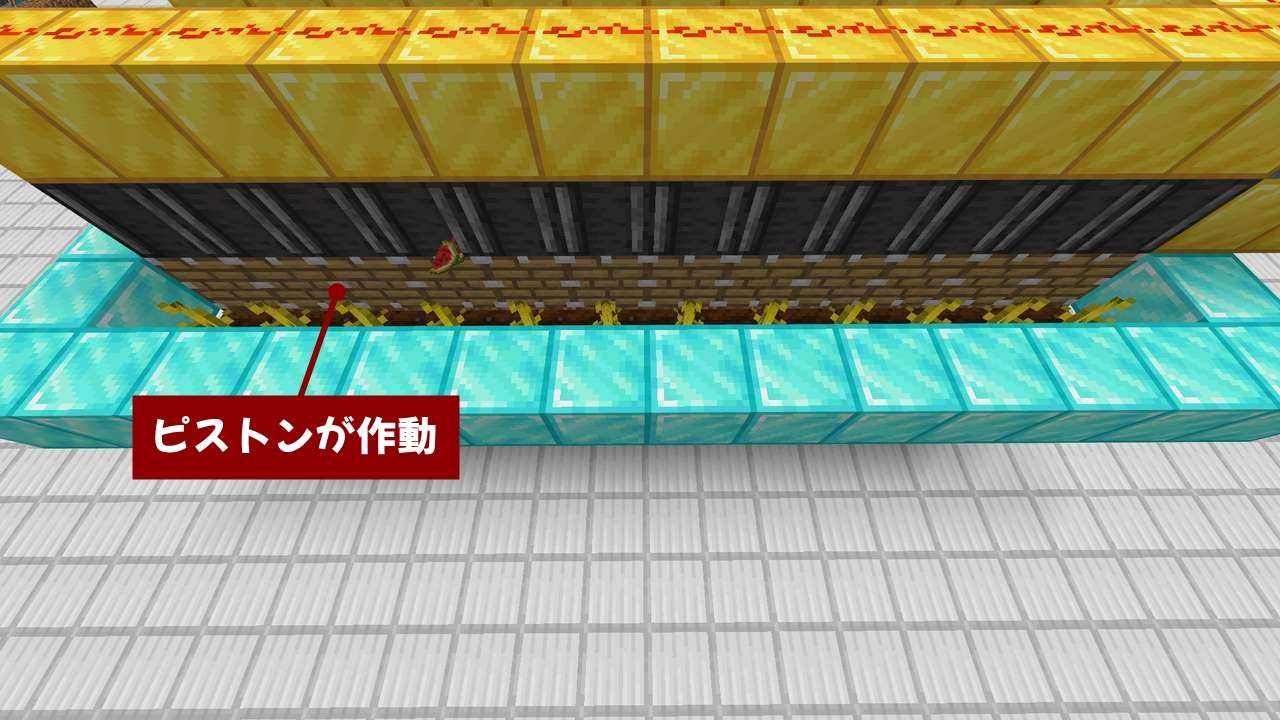
ピストンが作動してアイテム化。

下段のホッパー付きトロッコが回収してチェストに格納されていく、そんな装置です。
必要アイテム

- 建築用ブロック:いっぱい
- くわ:1
- チェスト:2
- 水バケツ:4(無限水源使えば1でOK)
- レール:28
- 加速レール:4
- ホッパー付きトロッコ:1
- レッドストーン:55
- レッドストーンブロック:4
- 観察者:24
- レッドストーン反復装置:2
- レッドストーンコンパレーター:1
- ホッパー:2
- ピストン:24
- 土ブロック(草ブロックでも可):48
- スイカ・カボチャの種:1~
クラフト材料として「鉄の延べ棒」がそこそこ必要です。足りなければ掘りに行くかアイアンゴーレムトラップで。

作り方
回収部分

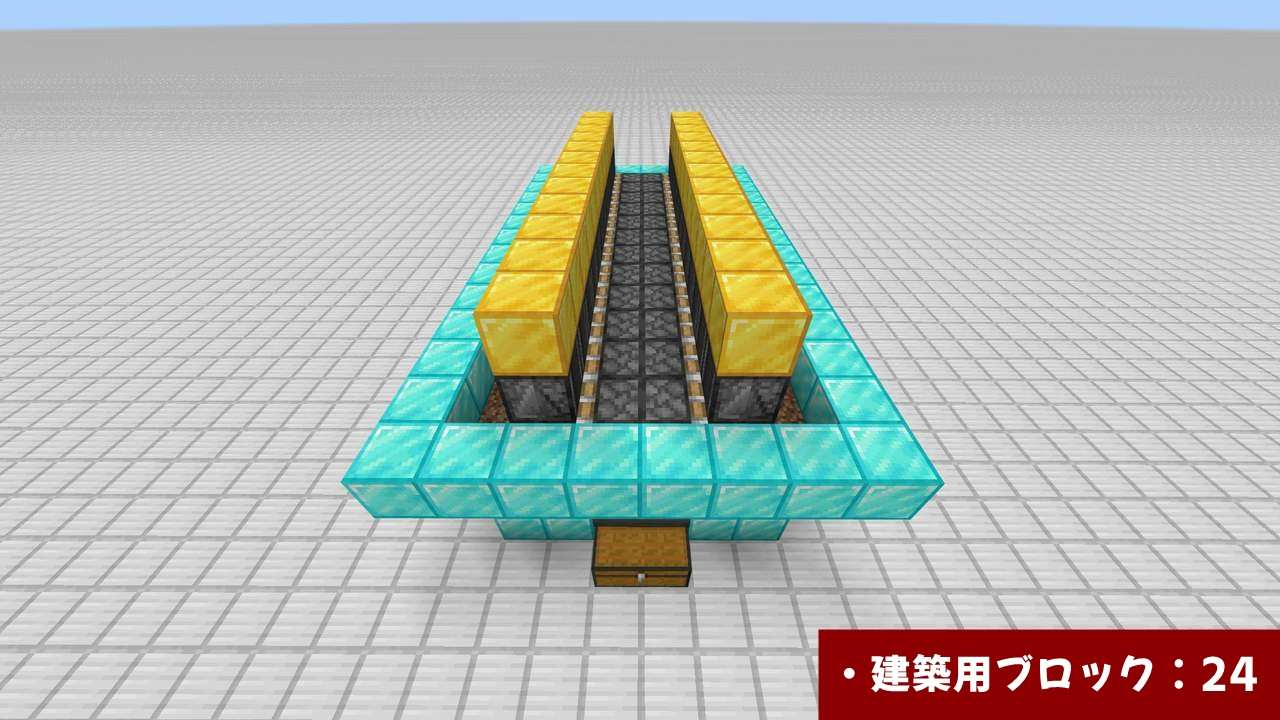
ふたつ並べたチェストの後ろからホッパーを接続。
ホッパーを接続するときはしゃがみながら!

囲うような形で建築用ブロックとレッドストーンブロックを設置。
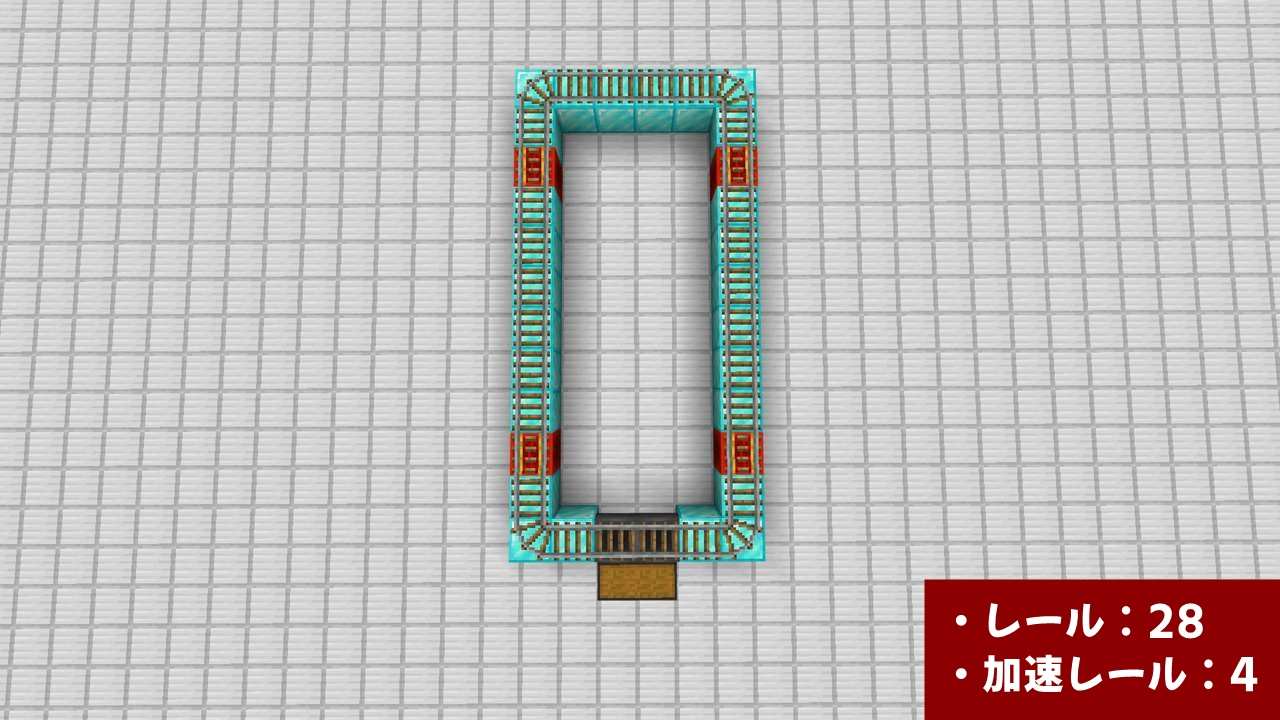
レッドストーンブロックの上には加速レールを置いて、それ以外には普通のレールを。
ホッパー上にレールを置くときはしゃがみながら!
栽培部分
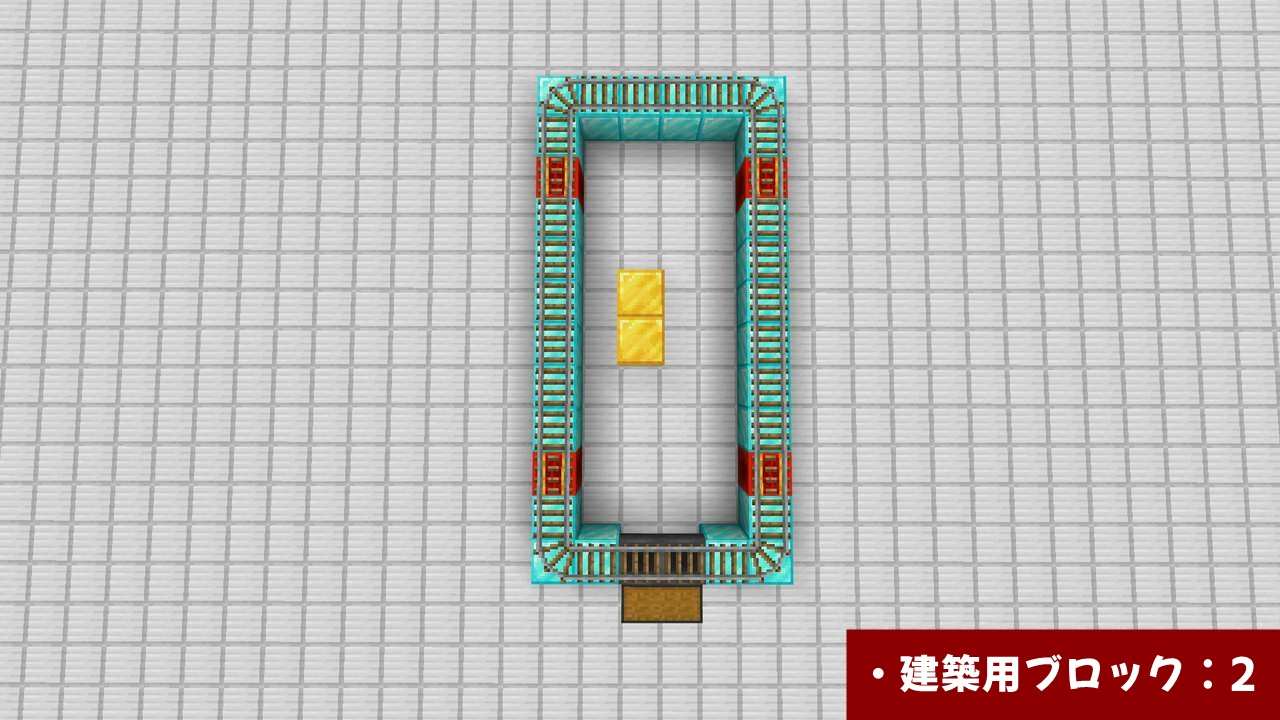
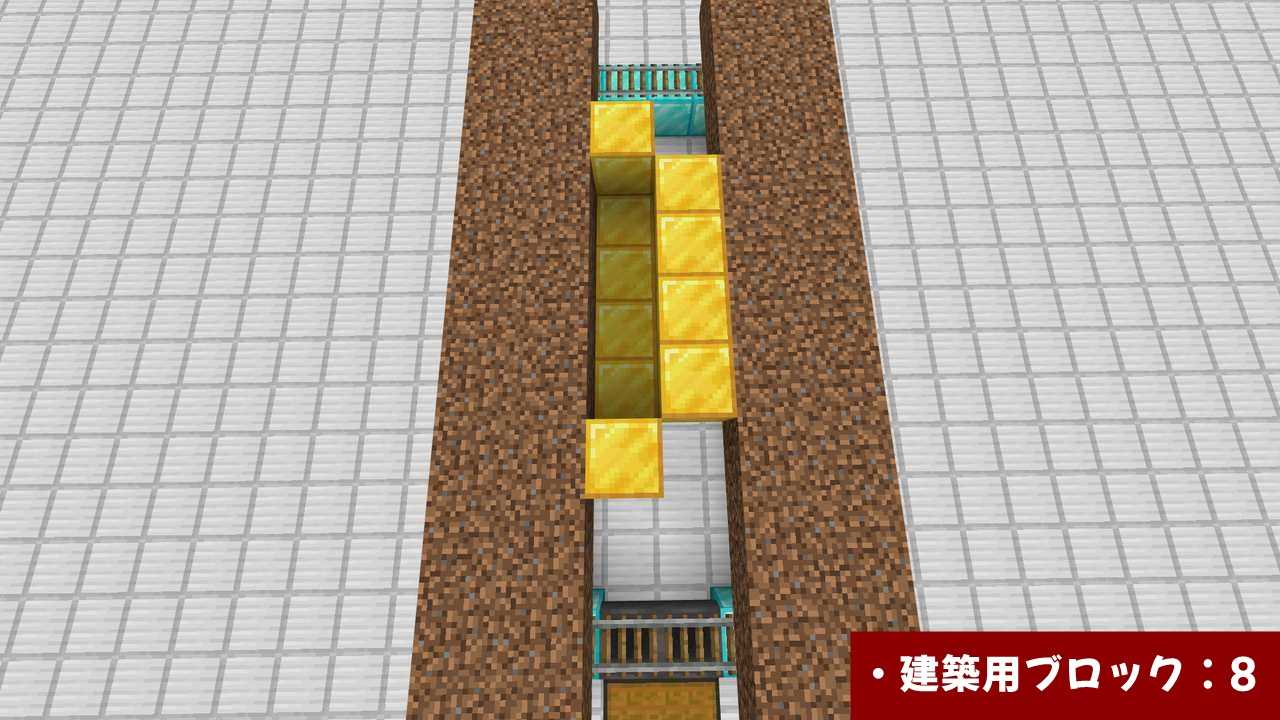
真ん中あたりに建築用ブロックをふたつ。

高さは2段目ですのでお間違えなきよう。
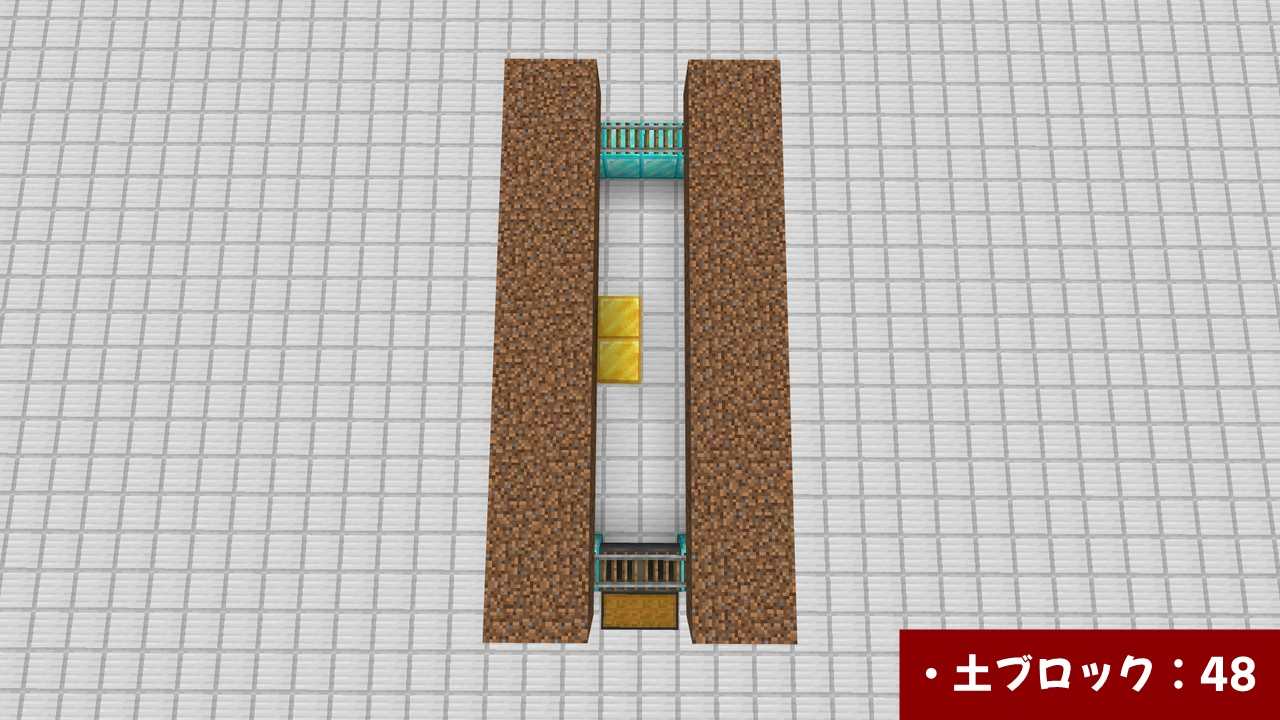
1段上げて、土ブロックを線路から線路まで置きます。
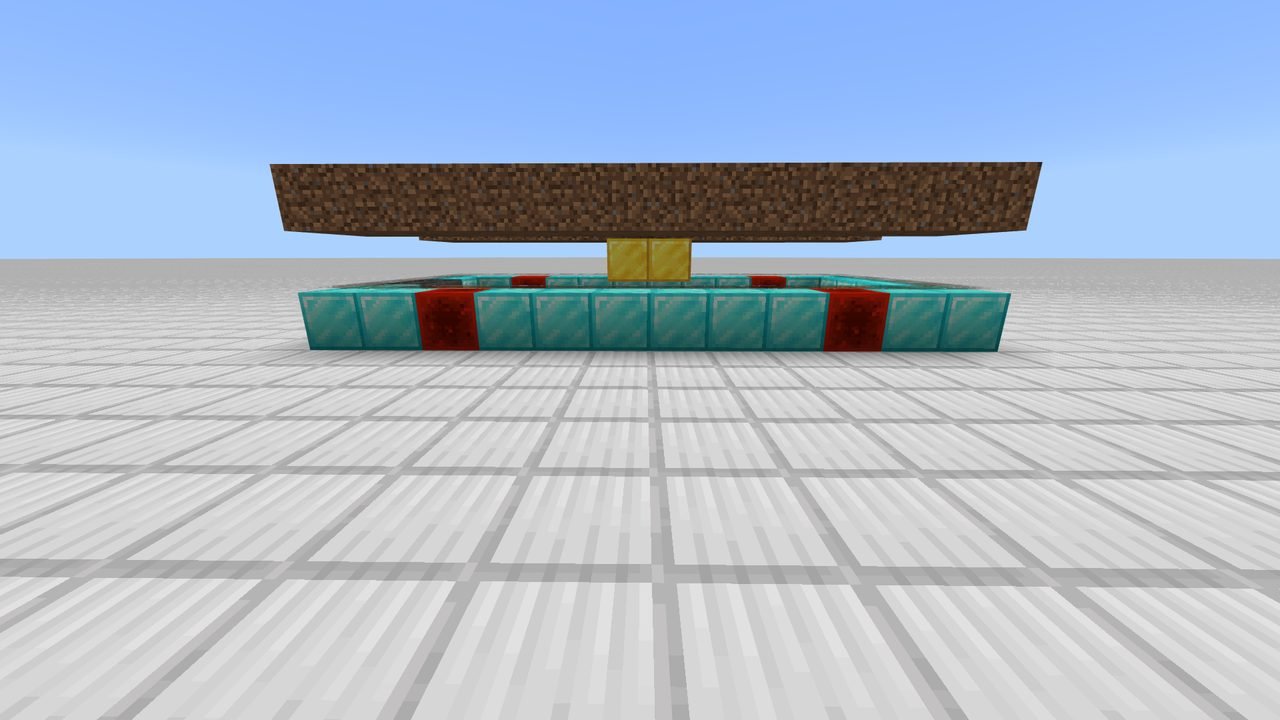
横から見たらこんな感じ。
さきほど置いたふたつの建築用ブロックを少し広げて囲んであげて、
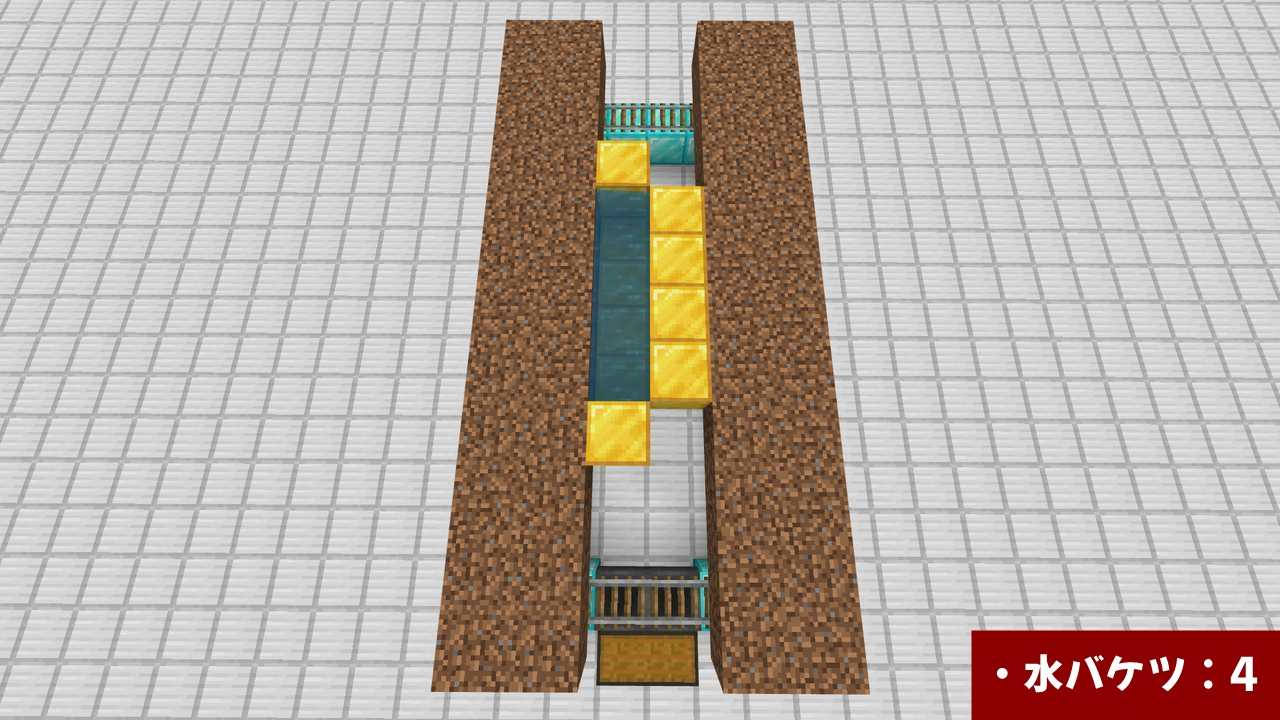
水を設置。
当初の設計とズレが生じたため、建築用ブロックをふたつ置くステップが謎に入っております。
装置部分
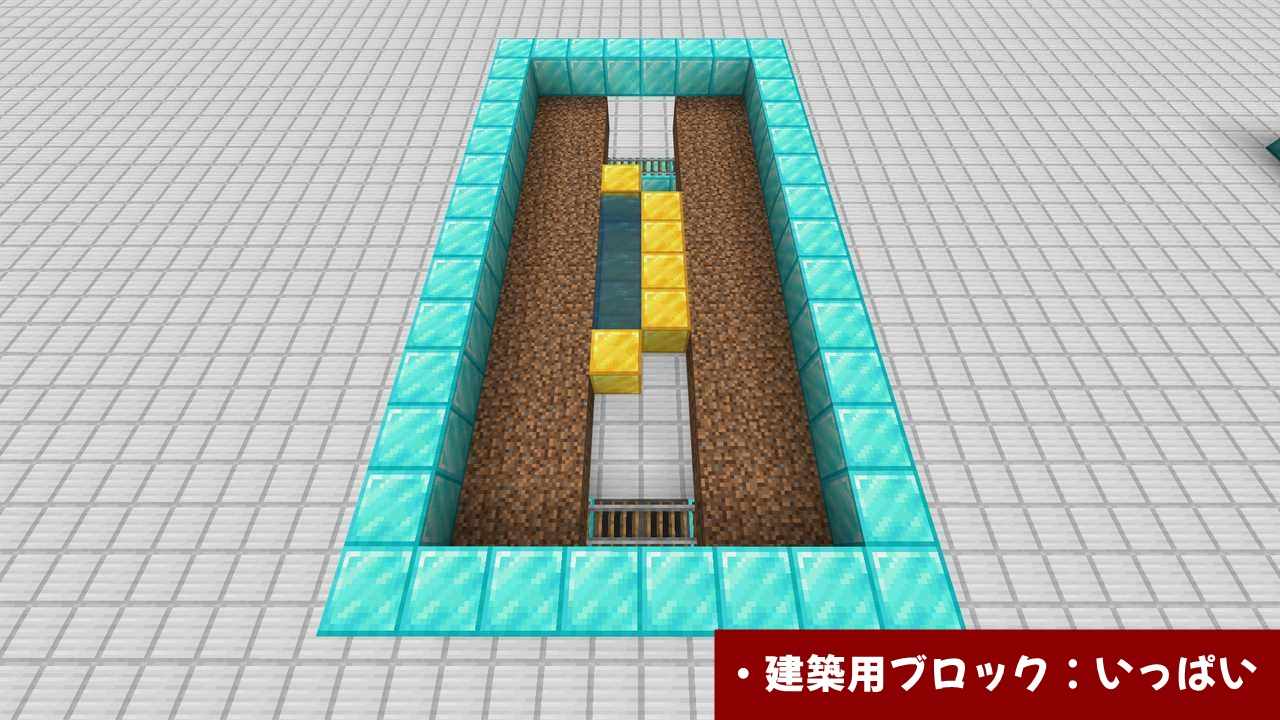
1段上げて周りを囲います。
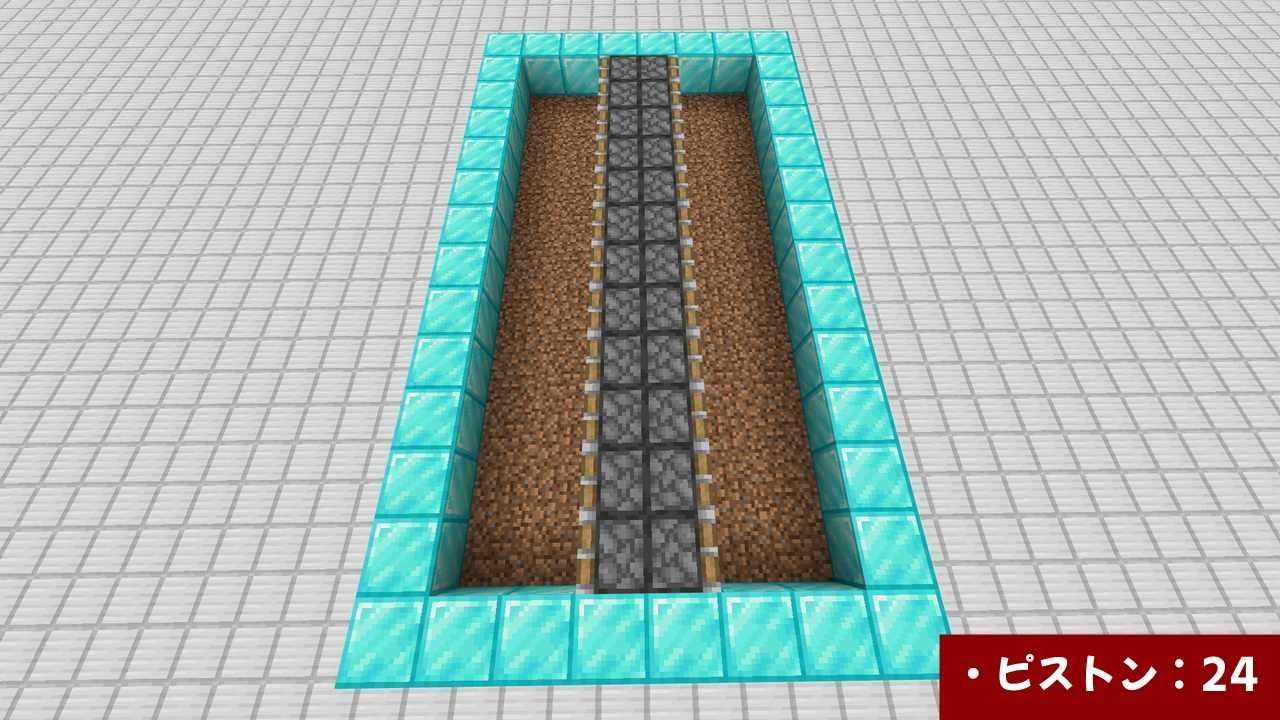
背中合わせにピストンを設置。
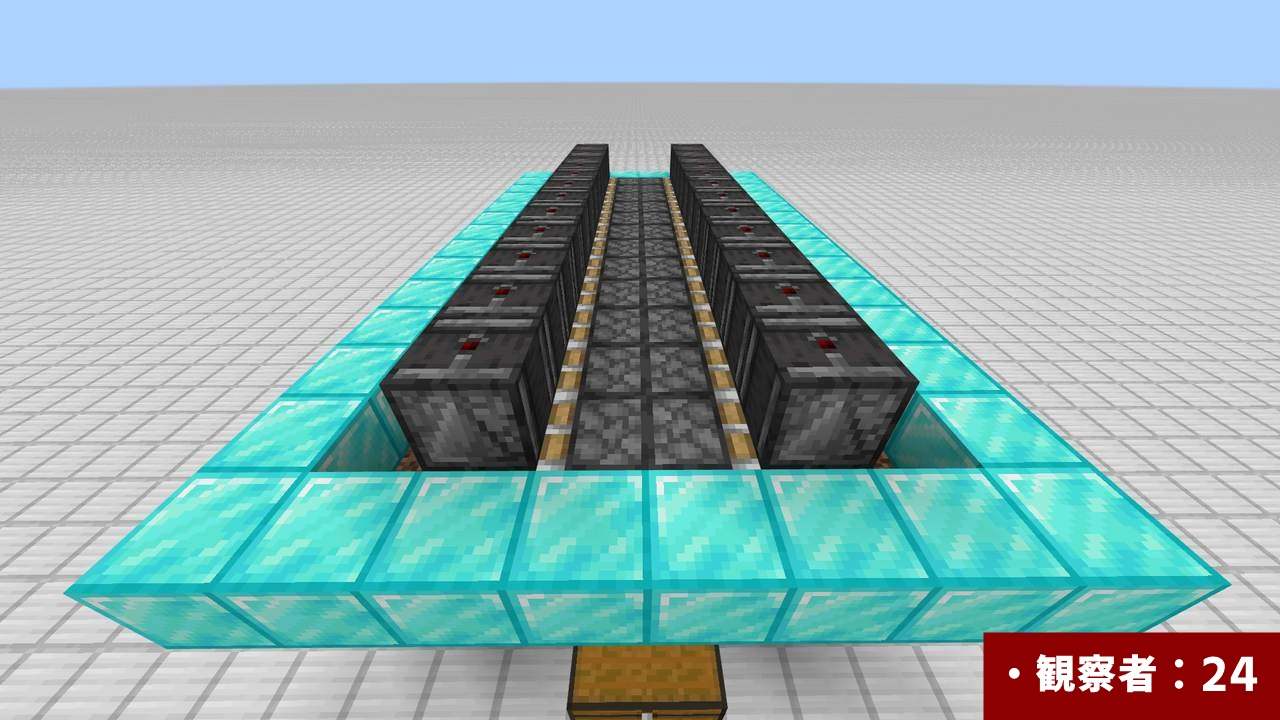
ピストンの斜め上から、下を観察する形で観察者。
観察者の上に建築用ブロック。

建築用ブロックをさらに7個追加します。

この位置に反復装置とコンパレーター。
下段の反復装置は遅延を2増やしておきます。(PCだと2回右クリック)
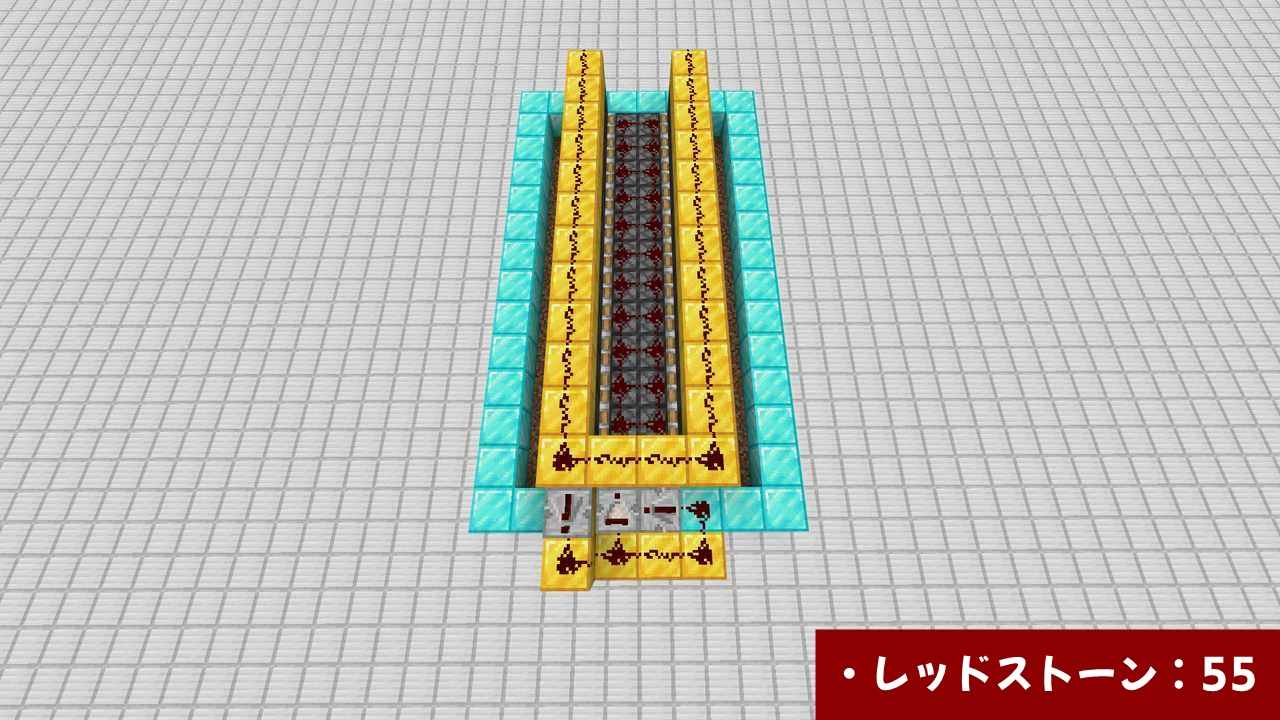
ズラーっとレッドストーンを設置。
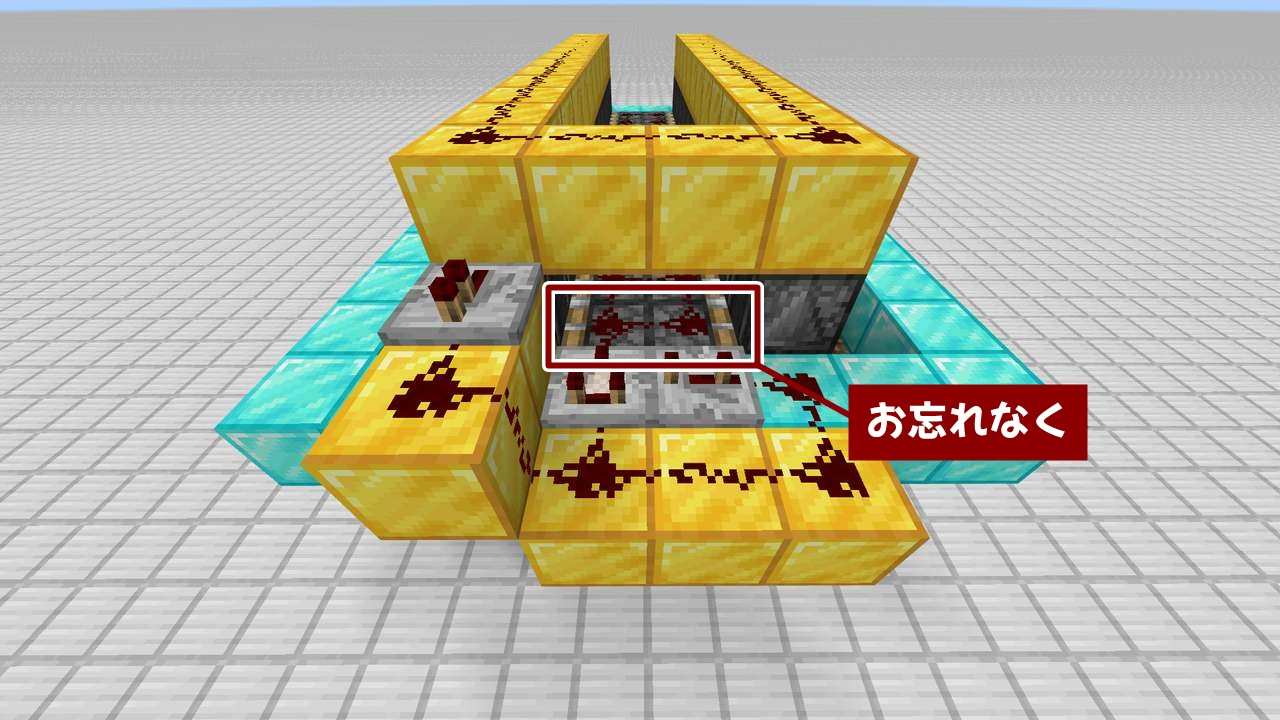
建築用ブロックの下もお忘れなく。

あとは下段の線路上にホッパー付きトロッコを走らせれば装置の完成!
動作確認
スイカ・カボチャを植える前に、まずは動作確認をしてみましょう。
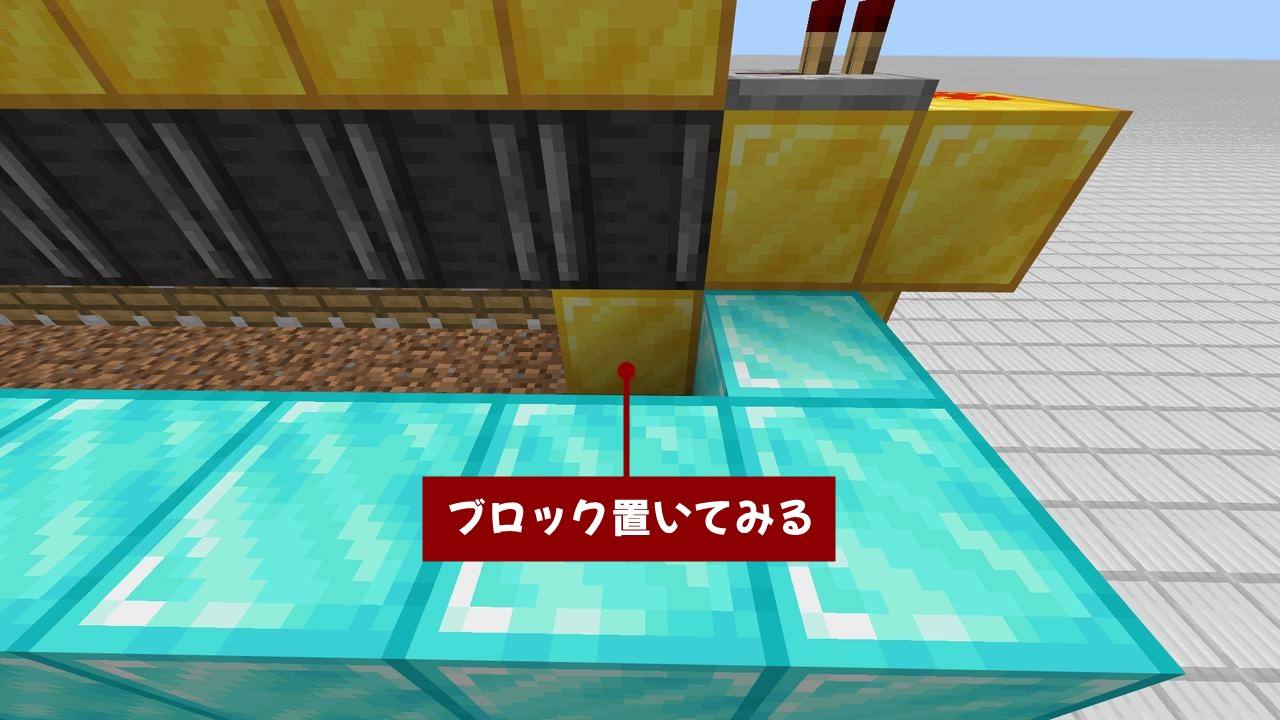
観察者の下にブロックを置いてみて、

全てのピストンが一度だけ作動し、ブロックを押し出してくれれば成功!
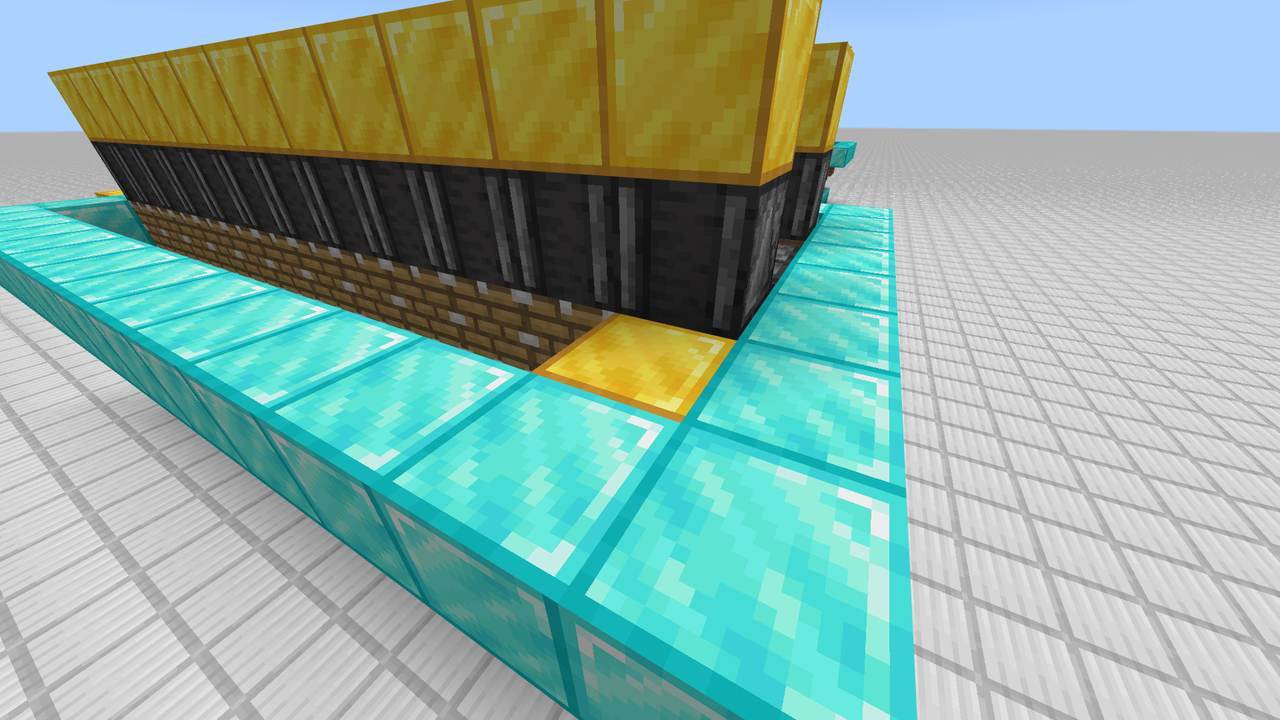
念のため、一番遠いところでも確認しておくと良いです。
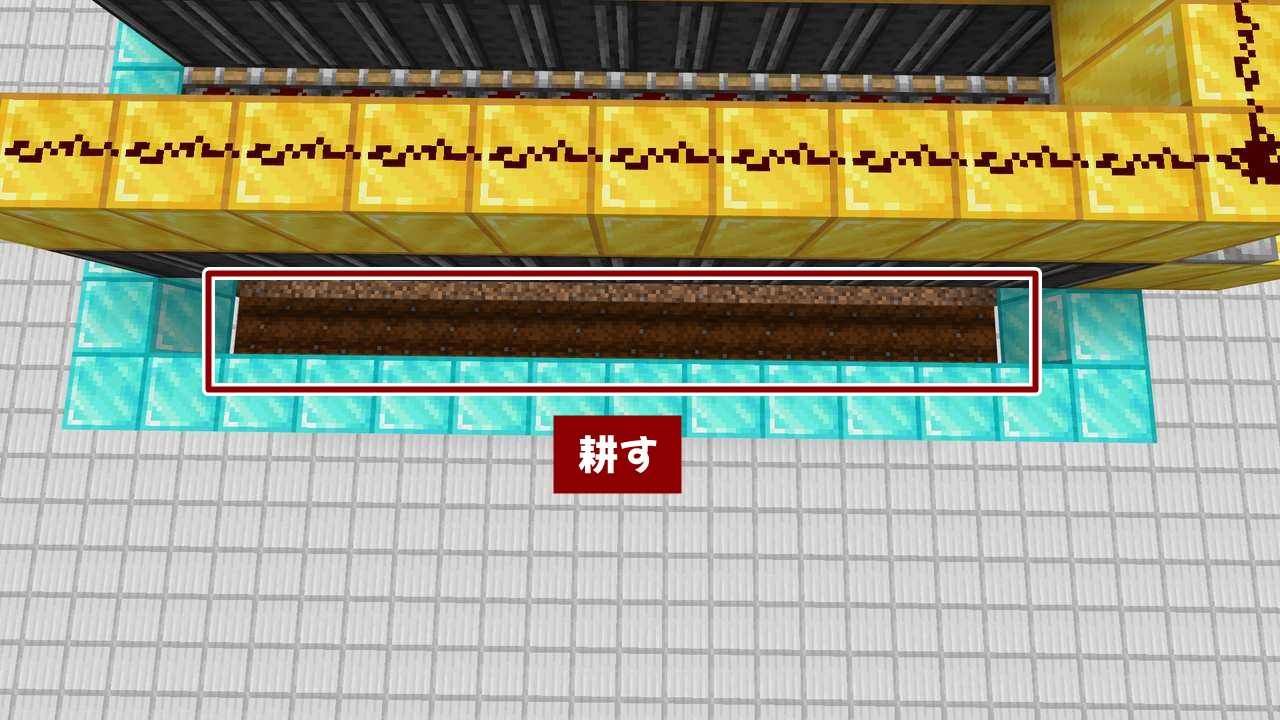
動作確認ができたらくわで耕して(耕すのは観察者の下じゃなくそのとなりなので注意)、
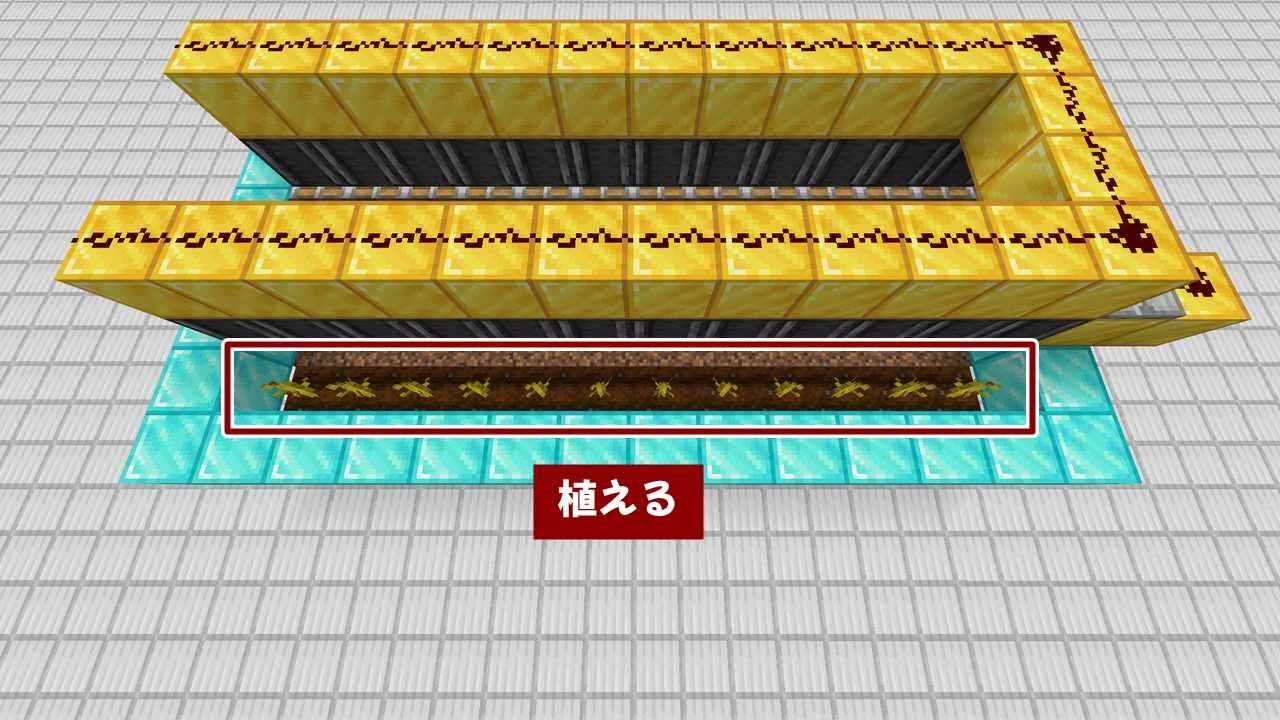
スイカ・カボチャを植えれば今度こそ完成!
仕組みの解説
この装置には
- ブロック上のスイカ・カボチャを回収する仕組み
- スイカ・カボチャの実がなったときにピストンを一度だけ作動させる仕組み
が組み込まれております。
ひとつずつ解説していきましょう。
ブロック上のスイカ・カボチャを回収する仕組み
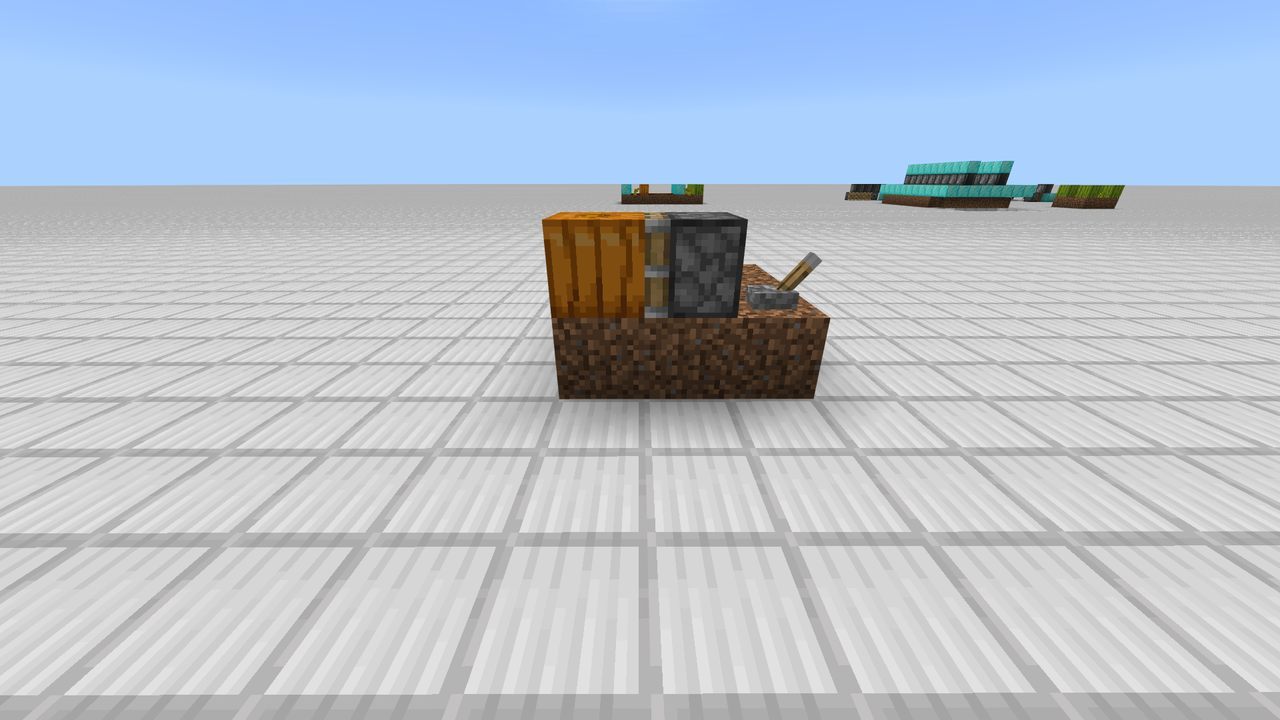
スイカ・カボチャはピストンで押し出されると、

アイテム化します。
そんでこのアイテム化したスイカ・カボチャを回収するのがホッパー付きトロッコ。

ホッパー付きトロッコは1ブロック上のアイテムを貫通して回収できる特性があるため、

装置の下段を走るコイツがスイカ・カボチャを回収してチェストに格納してくれるというわけです。
ブロック上のアイテムを回収する方法については、以下の記事に詳細が書いてあります。

スイカ・カボチャの実がなったときにピストンを一度だけ作動させる仕組み
観察者は観察対象の変化を感知したときに信号を流すブロック。
ゆえにスイカ・カボチャの実がなる場所を観察させて、信号をピストンに送れば万事OKかと思いきや・・・
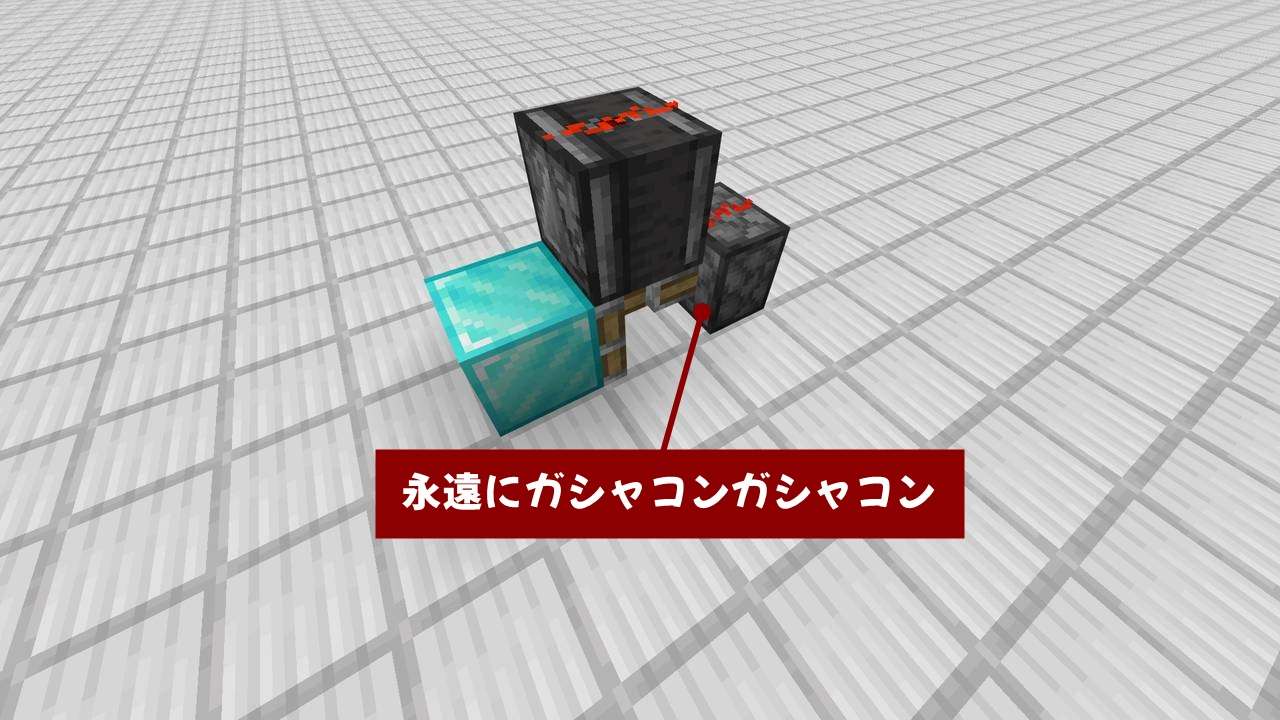
観察者の信号をピストンにそのまま送ると、ピストンがガシャコンガシャコンと永遠に動作し続けます。
これは観察者が「ピストンが動いたことすらも変化として感知してしまう」ためで、
- 実がなる⇒感知してピストン作動
- ピストンが動く⇒感知してピストン作動
- ピストンが戻る⇒感知してピストン作動
以降2と3を延々と繰り返してしまうんです。
だからマイクラにおいて、観察者にただピストンを観察させるのはご法度。
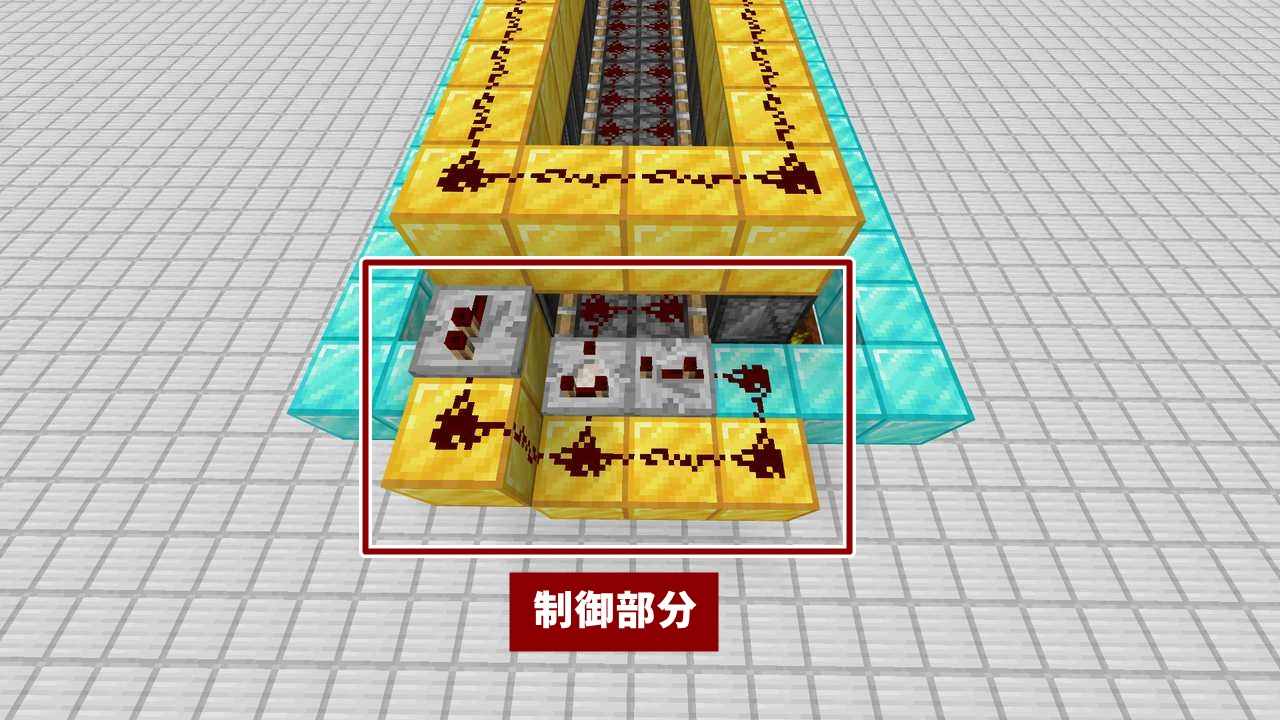
今回の装置ではココがその辺の制御をしていて、

実がなったのを感知してピストン作動した直後、

コンパレーターに横付けされた反復装置がレベル15の信号を与えるため、コンパレーターからの信号が途切れます。
※これはパルサー回路の原理。

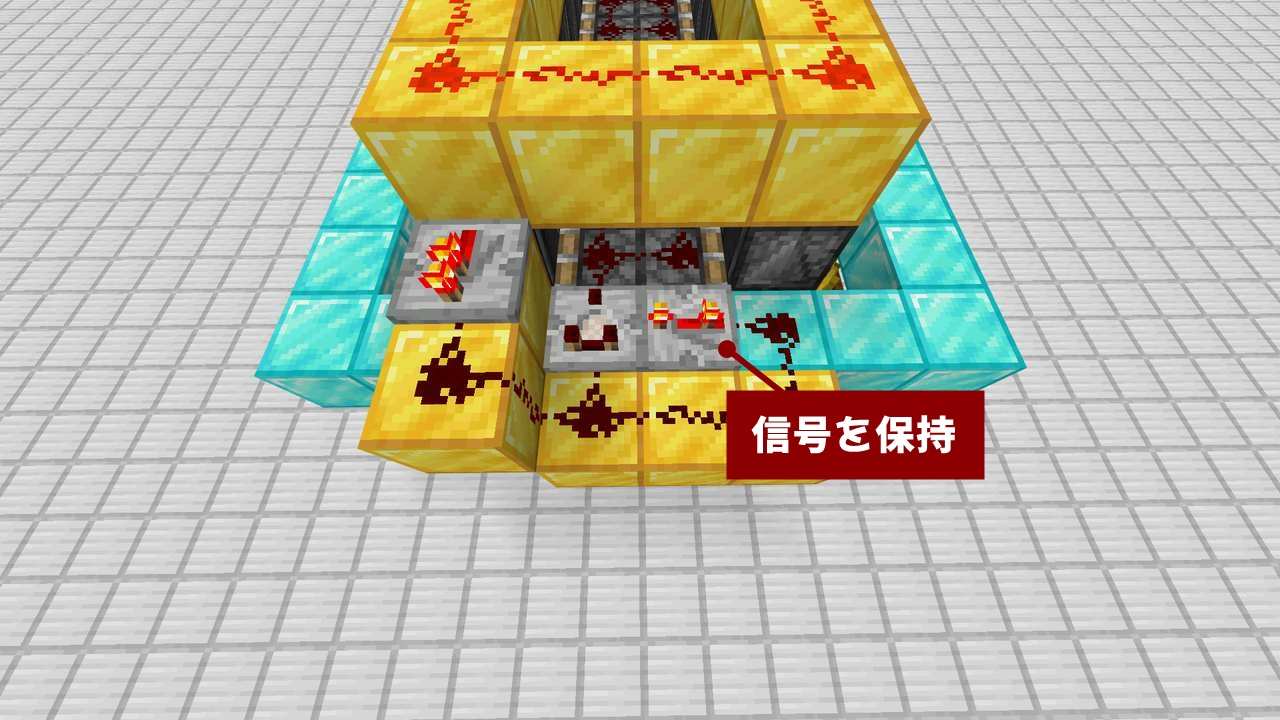
そのあとピストンの動作を感知してまた観察者から信号が流れてくるわけですが、反復装置は遅延効果により信号を保持したままなので、
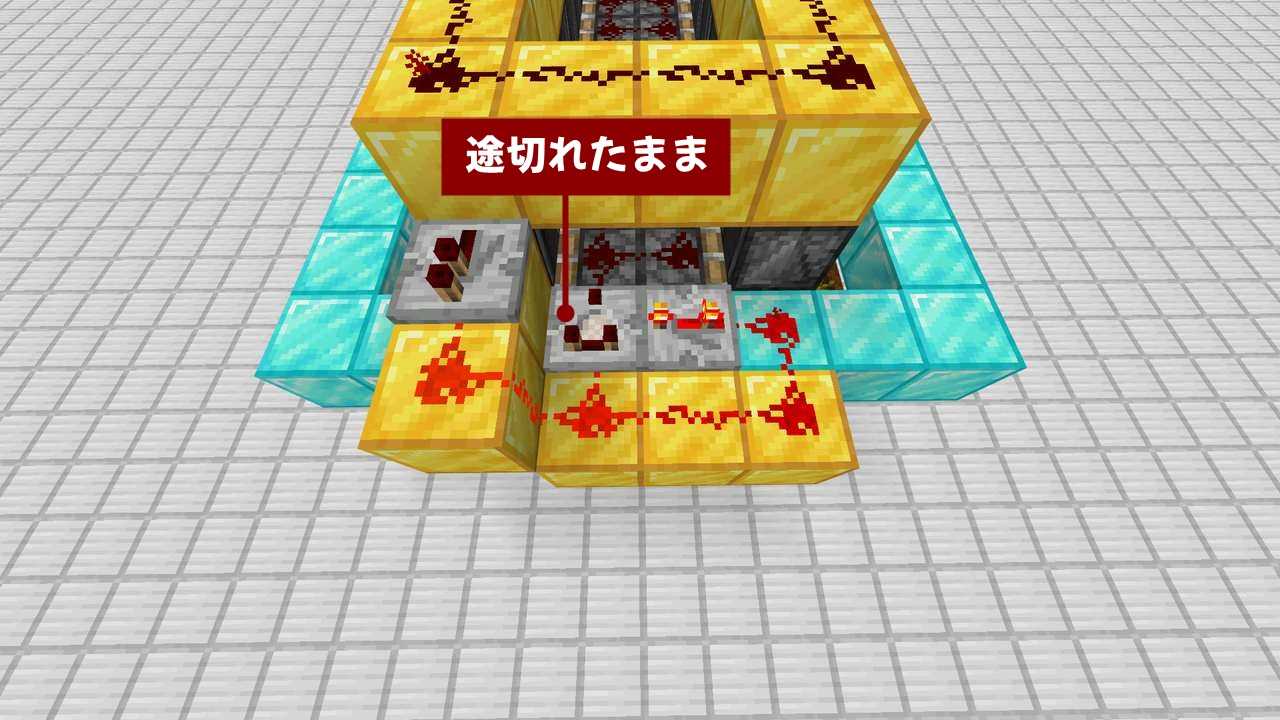
コンパレーターからの信号は途切れたままで、反復装置にだけ信号が流れます。
これはピストンが動いたときも戻ったときも同じ。
つまりピストン作動時に観察者から流れる信号が無効化されて、
- 実がなる⇒感知してピストン作動
- ピストンが動く⇒感知するけどピストン動かない
- ピストンが戻る⇒感知するけどピストン動かない
となり、実がなったときだけピストンが動く仕組みとなるわけです。

ちなみにこの反復装置は信号をレベル15まで増幅させるためだけに置いてます。
以上、スイカ・カボチャの観察者式自動収穫装置の作り方と解説でした。ではまた!(‘-‘)ノ


コメント
どのくらいの効率ですか
スイカ12か所・カボチャ12か所植えて10分稼働させてみたら33個・6個でしたね~。
放っといたら勝手に収穫してくれる系装置なので効率はそんなにです。